Member-only story
In this project, I used Python and OpenCV to find lane lines in the road images.
The following techniques are used:
- Color Selection
- Canny Edge Detection
- Region of Interest Selection
- Hough Transform Line Detection
Finally, I applied all the techniques to process video clips to find lane lines in them.
Test Images
The test images are shown below.
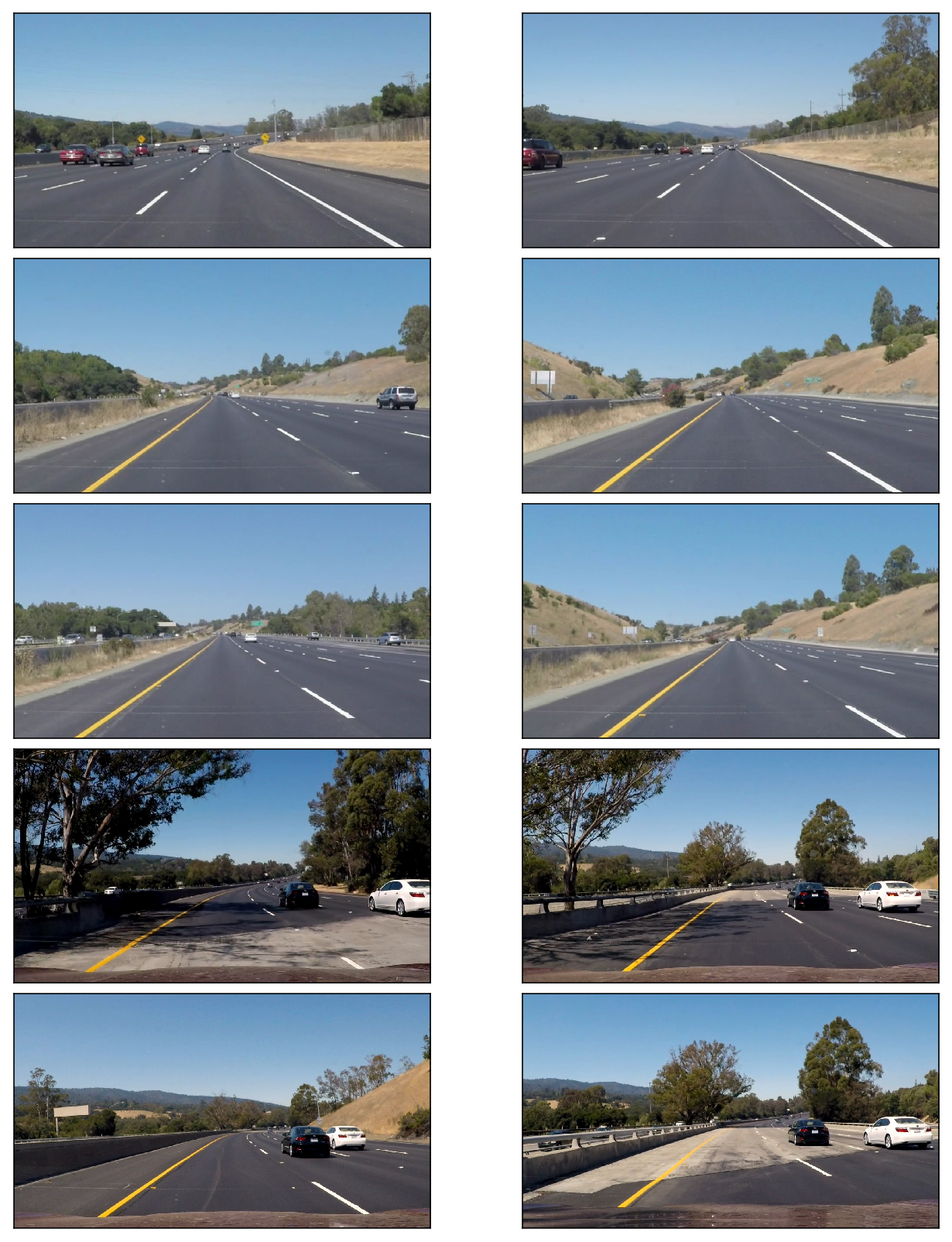
I use these images to test my pipeline (a series of image processing) to find lane lines on the road.
Lines are in white or yellow. A white lane is a series of alternating dots and short lines, which we need to detect as one line.
Color Selection
RGB Color Space
The images are loaded in RGB color space. Let’s try selecting only yellow and white colors in the images using the RGB channels (ref: RGB Color Code Chart).
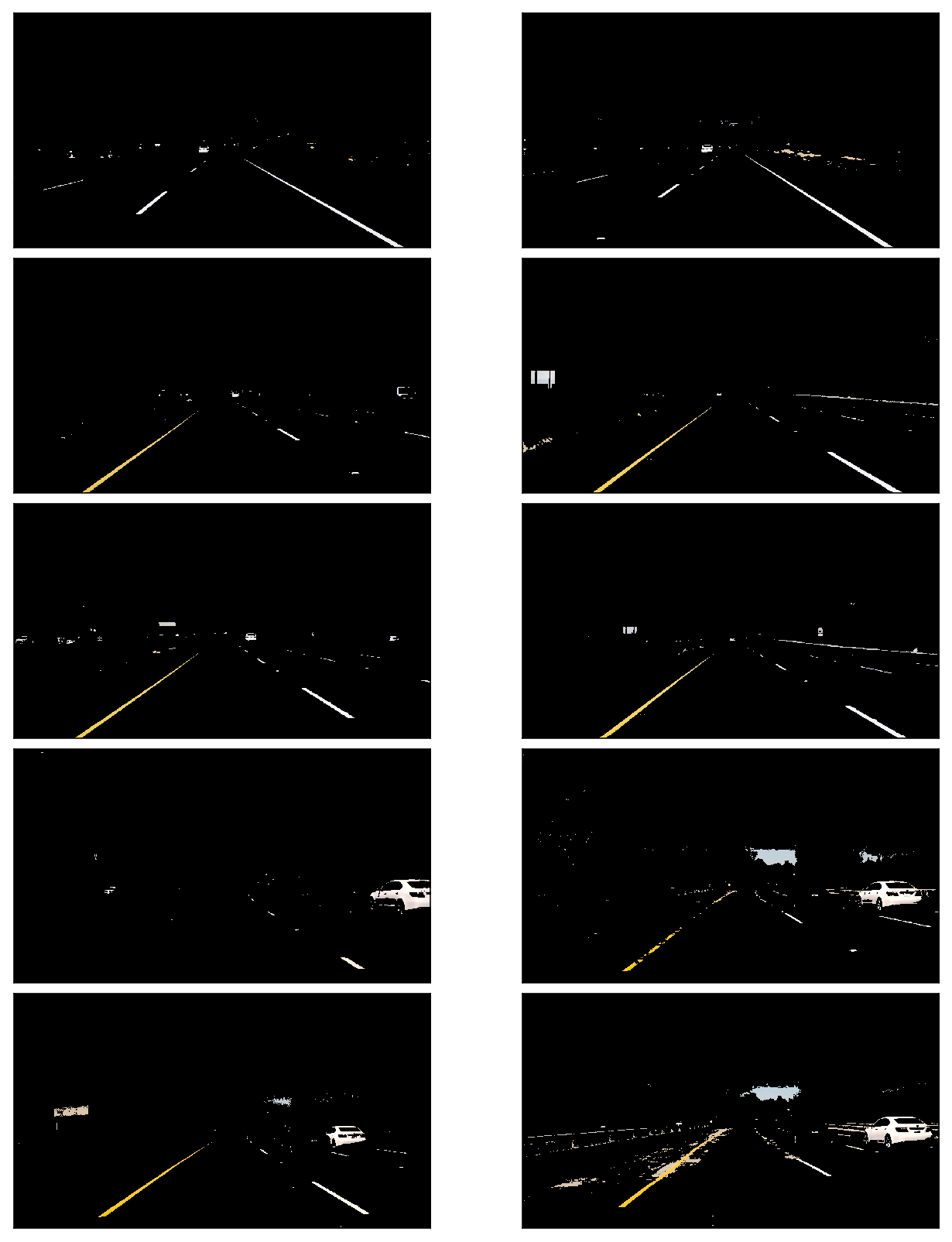
It looks pretty good except the two in which the yellow lines are not clear due to the dark shade from the tree on the left.
HSL and HSV Color Space
Using cv2.cvtColor, we can convert RGB image into different color space. For example, HSL and HSV color space.
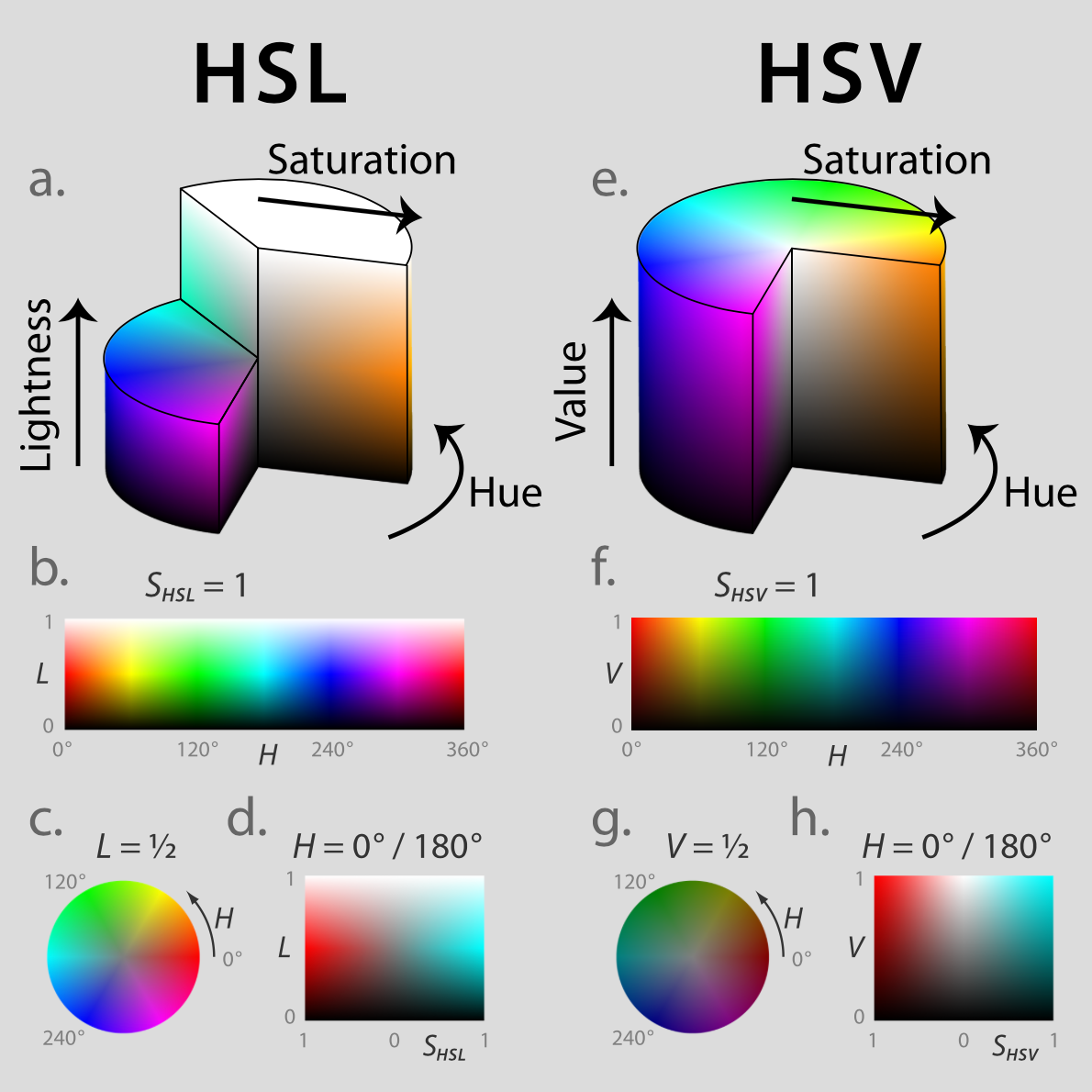
Image Source: https://commons.wikimedia.org/wiki/File:Hsl-hsv_models.svg
HSV Color Space
How does it look when RGB images are converted into HSV color space?
